

- 제 1조 . 본 사용 허가 협약에 동의하여 서명한 협약서를 한국전자통신연구원(이하 제공자)에 제출한 사람만이 본 데이터셋을 본 협약의 내용에 따라 보유하고 사용할 자격을 갖는다.
- 제 2조 . 본 데이터셋은 제공자의 서면 승인 없이 제3자에게 제공, 양도, 사용 허가할 수 없다.
- 제 3조 . 본 데이터셋은 연구용도로만 사용이 가능하며, 상업용으로 사용은 불허한다.
- 제 4조 . 본 데이터셋이 협약자로 인해 유출되어 문제가 발생하였을 경우 본 협약자는 민, 형사상의 모든 법정 책임을 부담한다.
3D Object Detection 데이터셋
- 등록자 김주영
- 등록일 (수정일 ) 2019-11-28 05:44 (2020-10-13 00:42)
- 조회수 3063
- 다운로드 수
- 추가업로드 불가
-
 자율주행
자율주행

좋아요
협약서
필요
(제출전)
Description
자율주행차량을 위한 3D 객체 검줄 기술 개발에 필요한 데이터 셋
제네시스 G80 차량을 기반으로 루프랙을 설치하고 그 위에 LiDAR를 설치하여 (Ouster OS-1 64 채널) 데이터를 수집하였음

nuScenes 데이터셋과 유사한 어노테이션 방식을 사용하였음
수집한 여러 데이터 중 20개의 frame으로 구성된 100개의 scene을 선정하였음 (frame rate: 2Hz)
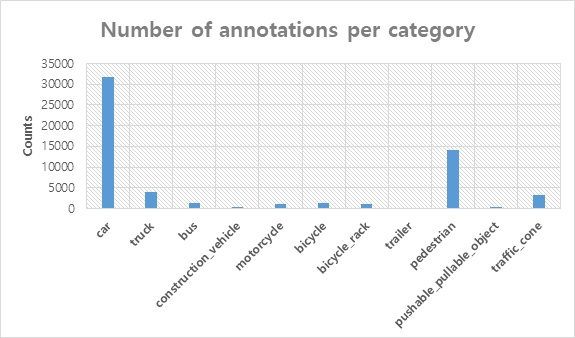
객체들을 11개의 클래스로 분류하였으며 총 58,946개의 객체가 검출되었음
어노테이션 파일은 .txt (space-separated value) 파일로 제공되며 아래와 같은 형식을 가지고 있음
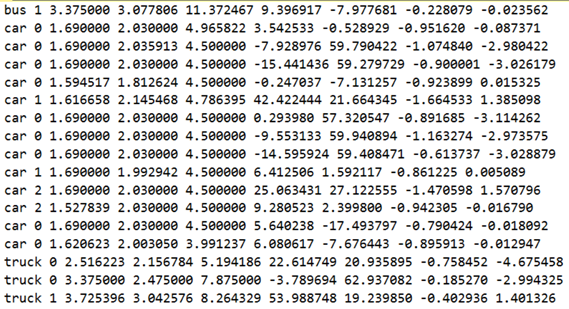
각 행은 포인트 클라우드 안의 3D Bounding box를 의미함
행의 각 열에 기입되있는 정보는 아래 표와 같음
# of values | Name | Description |
1 | type | 객체의 타입: ‘car’, ‘truck’, ‘bus’, ‘construction_vehicle’, ‘motorcycle’, ‘bicycle’, ‘bicycle_rack’, ‘trailer’, ‘pedestrian’, ‘pushable_pullable_object’, ‘traffic_cone’ |
1 | visibility | (0,1,2) 셋 중 하나의 값으로 visibility state를 나타냄: 0 = 81~100%, 1 = 41 ~ 80%, 2 = 0 ~ 40% |
3 | dimension | 3D 객체의 크기: height, width, length (in meters) |
3 | location | LiDAR coordinates에서의 3D 객체의 x,y,z 위치 (in meters) |
1 | rotation | Rotation rz around Z-axis in LiDAR [-pi..pi] |
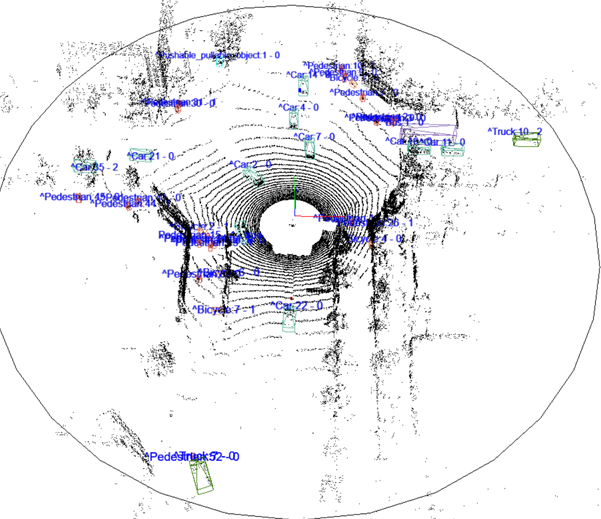
아래 그림들은 클래스 별 분포와 포인트 클라우드와 어노테이션된 3D Bounding box를 도시한 결과임
데이터
파일
(총
1 개)

3D Object Detection
요약 3D Object Detection

- 등록자 김주영
- 파일명 3D Object Detec...
- 크기 69.3MB
- 다운로드 수
3D Object Detection

