

- 제 1조 . 본 사용 허가 협약에 동의하여 서명한 협약서를 한국전자통신연구원(이하 제공자)에 제출한 사람만이 본 데이터셋을 본 협약의 내용에 따라 보유하고 사용할 자격을 갖는다.
- 제 2조 . 본 데이터셋은 제공자의 서면 승인 없이 제3자에게 제공, 양도, 사용 허가할 수 없다.
- 제 3조 . 본 데이터셋은 연구용도로만 사용이 가능하며, 상업용으로 사용은 불허한다.
- 제 4조 . 본 데이터셋이 협약자로 인해 유출되어 문제가 발생하였을 경우 본 협약자는 민, 형사상의 모든 법정 책임을 부담한다.
DeepGuider 데이터셋: Geo-tagged 인도 보행 영상
- 등록자 이재영
- 등록일 (수정일 ) 2021-12-17 00:50 (2021-12-17 00:59)
- 조회수 2136
- 다운로드 수
- 추가업로드 불가
-
 자율주행
자율주행

좋아요
협약서
필요
(제출전)
Description
데이터셋 소개
본 데이터셋은 인도(보행로)를 따라가면서 수집한 카메라 영상, 정밀 GPS 데이터, 저가 GPS 데이터, IMU 데이터로 구성된다. 본 데이터는 오픈소스로 진행되는 DeepGuider 프로젝트(https://github.com/deepguider/DeepGuider)에서 연구개발 목적으로 수집된 데이터셋으로서, 로봇이 인도를 따라가면서 주변의 환경을 인지하고 자신의 위치를 파악하기 위한 환경인식 목적으로 수집되었다. 데이터는 약 2 ~ 3개월 간격으로 1년에 걸쳐 수집되었으며 계절의 변화(가로수, 눈 등)에 따른 환경 인식 및 위치추정 실험용으로 활용이 가능하다.
사용 센서
Logitech C930e: RGB 웹카메라, 수평시야각 82도, 수직시야각 52도
NovAtel PwrPak7: 참값 측정용 DGPS (10Hz, 정확도 0.4m)
AsenKorea GPS620: 저가형 GPS (1Hz, 정확도 3.0m CEP)
XSENS MTi-30-2A5G4: AHRS
데이터 구성
영상데이터: 1280 x 720 해상도, 10 fps, AVI 동영상
저가형 GPS 위치: latitude(위도), longitude(경도), 1Hz
정밀 DGPS 위치: latitude(위도), longitude(경도), 10Hz
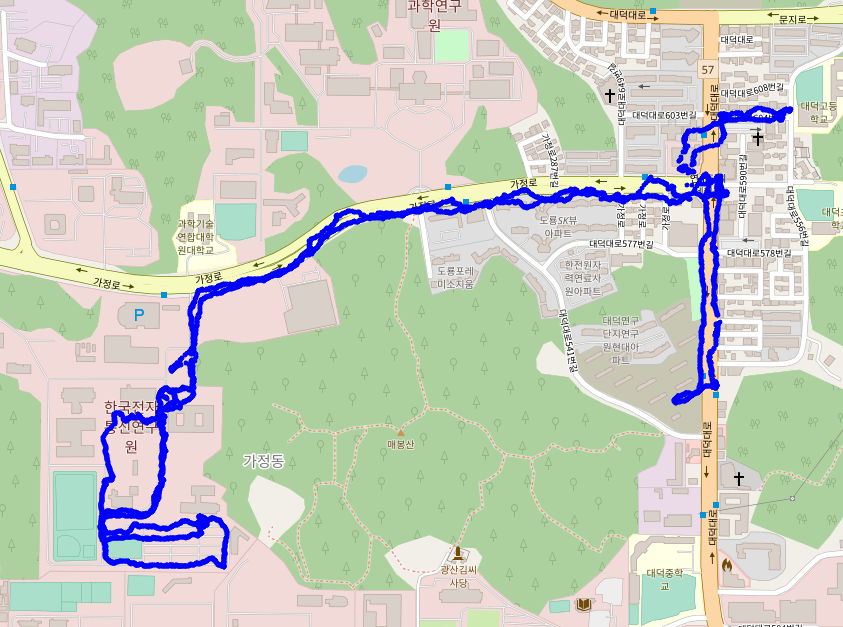
저가형 GPS 궤적: OpenStreetMap에 그려진 GPS 궤적
- 정밀 DGPS 궤적: OpenStreetMap에 그려진 DGPS 궤적
IMU(AHRS): quaternion 방향각, 10Hz


영상데이터의 타임스탬프(timestamp) 계산
영상데이터 외의 센서 데이터(GPS, IMU)는 timestamp를 포함한 .csv 파일로 되어 있다. 하지만, 영상데이터에는 별도의 timestamp가 없으며 i번째 영상 프레임의 timestamp는 다음과 같이 계산한다 (단, video_fps = 10, first_data_time = 센서 데이터의 최초 timestamp 값, video_scale = video_fps * (last_data_time - first_data_time) / total_frames).
timestamp = frame_index * video_scale / video_fps + first_data_time
데이터
파일
(총
6 개)

02월 데이터
요약

- 등록자 이재영
- 파일명 dg_street_20021...
- 크기 1.8GB
- 다운로드 수
04월 데이터
요약
- 등록자 이재영
- 파일명 dg_street_20042...
- 크기 1.2GB
- 다운로드 수
06월 데이터
요약
- 등록자 이재영
- 파일명 dg_street_20062...
- 크기 3.6GB
- 다운로드 수
09월 데이터
요약
- 등록자 이재영
- 파일명 dg_street_20090...
- 크기 559.0MB
- 다운로드 수
11월 데이터
요약
- 등록자 이재영
- 파일명 dg_street_20110...
- 크기 2.4GB
- 다운로드 수
12월 데이터
요약
- 등록자 이재영
- 파일명 dg_street_20121...
- 크기 380.0MB
- 다운로드 수

