




- 제 1조 . 본 사용 허가 협약에 동의하여 서명한 협약서를 한국전자통신연구원(이하 제공자)에 제출한 사람만이 본 데이터셋을 본 협약의 내용에 따라 보유하고 사용할 자격을 갖는다.
- 제 2조 . 본 데이터셋은 제공자의 서면 승인 없이 제3자에게 제공, 양도, 사용 허가할 수 없다.
- 제 3조 . 본 데이터셋은 연구용도로만 사용이 가능하며, 상업용으로 사용은 불허한다.
- 제 4조 . 본 데이터셋이 협약자로 인해 유출되어 문제가 발생하였을 경우 본 협약자는 민, 형사상의 모든 법정 책임을 부담한다.
[자율주행 인공지능 챌린지] 3차원 동적객체 검출 데이터셋
- 등록자 김주영
- 등록일 (수정일 ) 2024-08-27 10:00 (2024-09-05 14:53)
- 조회수 4059
- 다운로드 수
- 추가업로드 불가
-
 자율주행 챌린지
자율주행 챌린지

좋아요
협약서
필요
(제출전)
Description
| 데이터 정의 | 자율주행 차량에서 주변 동적객체를 3차원 Bounding Box 형태로 검출하기 위한 인공지능 학습 및 평가 데이터 셋 |
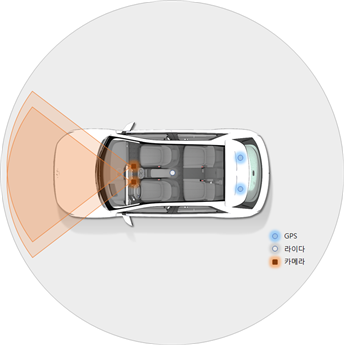
| 데이터 수집 | 자율주행 센서 데이터 수집차량을 이용한 수집 - 수집차량1: 제네시스 G80
- 센서: 라이다x1 Hesai Pandar64 (64Ch), 카메라x2 PointGrey CM3-U3-31S4C-CS - 수집주기: 10 Hz - 수집환경: 지역-경기, 세종, 대전 등, 시간-주간 및 야간 - 수집차량2: 카니발
- 센서: 라이다x1 Hesai Pandar128 (128Ch), Machine Vision 카메라x6 - 수집주기: 10 Hz - 수집환경: 지역-서울, 경기, 대전 등, 시간-주간 및 야간 |
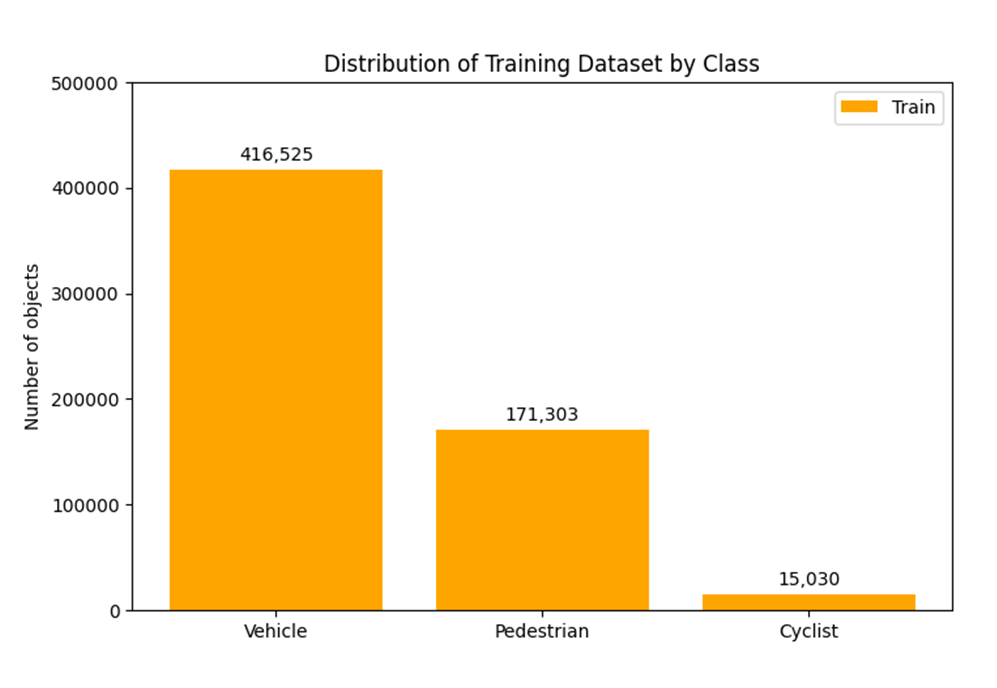
| 데이터 형태 | - 데이터 파일 . LiDAR Point Cloud 데이터 (.bin) . 레이블 파일 (.txt)(space-separated value) * x y z dx dy dz heading_angle category_name * 상세 내용은 아래 링크 참조 * https://github.com/open-mmlab/OpenPCDet/blob/master/docs/CUSTOM_DATASET_TUTORIAL.md - 클래스 구분 . 3종: Vehicle, Pedestrian, Cyclist |
| 데이터 통계 | - 데이터 수 . 학습 데이터: 17,174 프레임 . 평가 데이터: 9,519 프레임
|
| 데이터 샘플 이미지 |
|
| 담당자 | ETRI 김주영 선임 / kimjy@etri.re.kr, 042-860-5157 |
데이터 파일은 분할 압축으로 되어 있으며 6개 모두 받아서 압축 해제를 해주시기 바랍니다.
학습데이터가 올바르게 비식별화 되지 않았거나 부적절한 데이터를 발견하셨다면 위 전자메일로 알려주면 즉시 조치하도록 하겠습니다.
데이터
파일
(총
6 개)

3d_mod_av_db(1/6)
요약 3차원 동적객체 검출 데이터셋(1/6...

- 등록자 김주영
- 파일명 3d_mod_av_db.zi...
- 크기 3.3GB
- 다운로드 수
3차원 동적객체 검출 데이터셋(1/6)
3d_mod_av_db(2/6)
요약 3차원 동적객체 검출 데이터셋(2/6...
- 등록자 김주영
- 파일명 3d_mod_av_db.z0...
- 크기 10.0GB
- 다운로드 수
3차원 동적객체 검출 데이터셋(2/6)
3d_mod_av_db(3/6)
요약 3차원 동적객체 검출 데이터셋(3/6...
- 등록자 김주영
- 파일명 3d_mod_av_db.z0...
- 크기 10.0GB
- 다운로드 수
3차원 동적객체 검출 데이터셋(3/6)
3d_mod_av_db(4/6)
요약 3차원 동적객체 검출 데이터셋(4/6...
- 등록자 김주영
- 파일명 3d_mod_av_db.z0...
- 크기 10.0GB
- 다운로드 수
3차원 동적객체 검출 데이터셋(4/6)
3d_mod_av_db(5/6)
요약 3차원 동적객체 검출 데이터셋(5/6...
- 등록자 김주영
- 파일명 3d_mod_av_db.z0...
- 크기 10.0GB
- 다운로드 수
3차원 동적객체 검출 데이터셋(5/6)
3d_mod_av_db(6/6)
요약 3차원 동적객체 검출 데이터셋(6/6...
- 등록자 김주영
- 파일명 3d_mod_av_db.z0...
- 크기 10.0GB
- 다운로드 수
3차원 동적객체 검출 데이터셋(6/6)

