


- 제 1조 . 본 사용 허가 협약에 동의하여 서명한 협약서를 한국전자통신연구원(이하 제공자)에 제출한 사람만이 본 데이터셋을 본 협약의 내용에 따라 보유하고 사용할 자격을 갖는다.
- 제 2조 . 본 데이터셋은 제공자의 서면 승인 없이 제3자에게 제공, 양도, 사용 허가할 수 없다.
- 제 3조 . 본 데이터셋은 연구용도로만 사용이 가능하며, 상업용으로 사용은 불허한다.
- 제 4조 . 본 데이터셋이 협약자로 인해 유출되어 문제가 발생하였을 경우 본 협약자는 민, 형사상의 모든 법정 책임을 부담한다.
[자율주행]LiDAR Semantic Segmentation 학습 데이터
- 등록자 김주영
- 등록일 (수정일 ) 2023-11-21 15:15 (2023-11-28 09:04)
- 조회수 903
- 다운로드 수
- 추가업로드 불가
-
 자율주행
자율주행

좋아요
협약서
필요
(제출전)
Description
1. 데이터 명세
| 데이터 정의 | 자율주행 차량에서 주변 객체 및 도로 환경을 Pixel-wise Semantic Segmentation 형태로 인식하기 위한 인공지능 학습 데이터셋 |
| 데이터 수집 | 자율주행 센서 데이터 수집차량을 이용한 수집 - 수집차량: 제네시스 G80 및 IONIQ
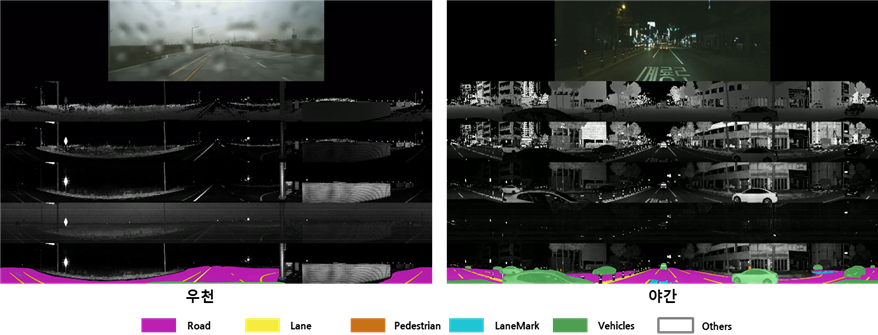
- 센서: Ouster 64ch OS1 (64Ch) - 수집 주기: 10 Hz - 수집 지역: 지역-대전광역시, 화성K-CITY, 서울 종로구 - 수집 시간: 주간, 야간, 우천 |
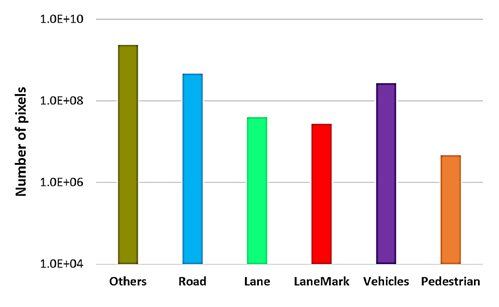
| 데이터 형태 | 데이터 파일 - LiDAR 2D Projection 데이터(Ambient, Intensity, Depth) (.png) - 레이블 파일 (.png) 클래스 구분: 6종(Road, Lane, Pedestrian, LaneMark, Vehicles, Others)
|
데이터 샘플 이미지 |
|
2. 데이터 공개기관 및 관련 과제
- 상기 데이터는 과학기술정보통신부 자율주행기술개발혁신사업의 “자율주행 AI 서비스통합 프레임워크 개발” 과제를 수행하며 한국전자통신연구원에서 구축한 데이터 임
3. 라이선스
-  (CC BY-NC-ND)
(CC BY-NC-ND)
4. 사사문구 표기: 본 데이터셋을 활용한 연구결과를 국내외 학술지 및 학술대회에 게재/공개할 때에는 아래와 같이 본 데이터 셋의 활용 사실을 밝혀야 함.
- 본 논문은 한국전자통신연구원에서 ETRI AI 나눔을 통해 공개한 [자율주행] LiDAR Semantic Segmentation 학습 데이터 셋을 사용함.
5. 개인정보 비식별화
한국전자통신연구원에서는 귀하의 개인정보를 보호하기 위하여 데이터 비식별화 처리(보행자 안면 및 차량번호판)를 하고 있습니다. 만약 데이터가 올바르게 비식별화 되지 않았거나 부적절한 데이터를 발견하셨다면 아래의 연락처(전자메일)로 알려주면 즉시 조치하도록 하겠습니다.
- 담당자 연락처: kimjy@etri.re.kr
데이터
파일
(총
1 개)

LiDAR Semantic Segmentation 학습 데이터
요약

- 등록자 김주영
- 파일명 LiDARSemanticSe...
- 크기 18.2GB
- 다운로드 수

