










- 제 1조 . 본 사용 허가 협약에 동의하여 서명한 협약서를 한국전자통신연구원(이하 제공자)에 제출한 사람만이 본 데이터셋을 본 협약의 내용에 따라 보유하고 사용할 자격을 갖는다.
- 제 2조 . 본 데이터셋은 제공자의 서면 승인 없이 제3자에게 제공, 양도, 사용 허가할 수 없다.
- 제 3조 . 본 데이터셋은 연구용도로만 사용이 가능하며, 상업용으로 사용은 불허한다.
- 제 4조 . 본 데이터셋이 협약자로 인해 유출되어 문제가 발생하였을 경우 본 협약자는 민, 형사상의 모든 법정 책임을 부담한다.

좋아요
협약서
필요
(제출전)
Description
자율주행차량을 위한 후미등 검줄 기술 개발에 필요한 데이터 셋
제네시스 G80 차량에 루프랙을 설치하고 그 위에 Point gray 카메라(Model: CM3-U3-31S4C-CS)를 설치하여 데이터를 수집하였음
초당 10프레임, 주간환경의 대전 및 서울지역에서 데이터를 취득함
타겟 차량의 후미등이 한번 이상 상태변화가 일어나는 구간을 위주로 시퀀스 획득하였음
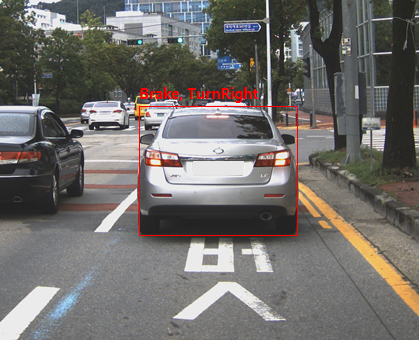
타겟 차량의 영상 내 위치와 각 프레임에서의 상태를 태깅하였으며 그 예시는 아래 이미지와 같음
그림 1. 태깅 예시
총 3219시퀀스, 총 114487 frames의 이미지로 구성돼 있음
어노테이션은 아래와 같은 형식의 json 파일에 저장돼 있음
[
{
"boundingBox": {
"height": 477.9265440147874,
"left": 974.3994912301486,
"top": 746.136067223086,
"width": 517.8726432160234
},
"tags": [
"Brake",
"TurnLeft"
]
}
] |
하나의 프레임마다 하나의 json 파일을 가지며 각 타겟 차량 1대에 대한 "boundingBox"와 "tags" 정보를 저장하였음
"tags"가 가질 수 있는 value는 ["None", "Brake", "TurnLeft", "TurnRight", "TurnEmergency"]의 조합이며 이에 따른 태깅 예시는 아래 표와 같음
표 1. 태깅 예시
| Class | Example | Class | Example | Class | Example | Class | Example |
OOO ["None"] |
| OLO ["TurnLeft"] |
| OOR ["TrunRight"] |
| OLR ["TurnEmergency"] |
|
BOO ["Brake"] |
| BLO ["Brake", "TurnLeft"] |
| BOR ["Brake", "TurnRight"] |
| BLR ["Brake", "TurnEmergency"] |
|
데이터
파일
(총
1 개)

후미등 데이터셋
요약 전체 데이터 중 158장의 ...

- 등록자 김주영
- 파일명 TailLight.zip
- 크기 91.0MB
- 다운로드 수
전체 데이터 중 158장의 데이터를 샘플로 제공하며 추가 데이터 필요 시 별도 문의 바랍니다.

